Digitized Reflections and Rotations with Geometric Algebra
Stéphane Breuils, Yukiko Kenmochi, Akihiro Sugimoto
Why geometric algebra?
Reflections
\( {\color{green}\mathbf{y}} = -{\color{blue}\mathbf{m}} {\color{red}\mathbf{x}} {\color{blue}\mathbf{m}^{-1}} \)
Why geometric algebra?
Reflections to rotations
\( {\color{green}\mathbf{y}} = \mathbf{Q} {\color{red}\mathbf{x}} \mathbf{Q}^{-1} \)
\( \mathbf{Q} = \color{blue}\mathbf{m}\mathbf{n} \)
Why geometric algebra?
Reflections, rotations (and translations)
\( \mathbf{Q} = \color{blue}\mathbf{m}\mathbf{n} = \cos{\frac{\theta}{2}} + \sin{\frac{\theta}{2}} \mathbf{e}_{12} \) \( (2D)\)
\( \bullet \) defined for any dimension
\( \bullet \) generic and easy to manipulate
Knowing \(\mathbf{m} \) normal vector to the line of reflection, reflection of \( \mathbf{x} \) :
\( \mathbf{y} = -\mathbf{m} \mathbf{x} \mathbf{m}^{-1} \)
Product \(\mathbf{m} \mathbf{n} \), rotation of \( \mathbf{x} \) :
Digital Geometry and Geometric Algebra (GA)
New bijective rotations from bijective digitized reflections
Operators
Digitized reflections
\( \bullet \) Reflections \( \mathcal{U}^{m} \)
\( \bullet \) Digitized operator \( \mathcal{D} \)
\( \bullet \) Digitized reflections \( \mathcal{R}^{\mathbf{m}}\)
Digitized cell
\( \bullet \) Equivalent to the Voronoi cell definition
\( \mathcal{C}_{1}(\mathbf{0})\)
\( \mathcal{C}_{1}(\mathbf{t})\)
\( \mathbf{t} = 3 \mathbf{e}_1 + 2 \mathbf{e}_2\)
Digitized cell
\( \bullet \) Equivalent to the Voronoi cell definition
\(\mathcal{C}_{\frac{\mathbf{m}}{||\mathbf{m} || }} (\mathbf{0}) \)
Digitized cell
\( \bullet \) Definition
\( \bullet \) Includes
\( \hookrightarrow \) Cell reflection
\( \hookrightarrow \) Cell translation, rotation
Bijectivity condition
\( \bullet \) Set of remainder
\( \bullet \) Bijectivity condition
\( \mathcal{C}_{\frac{\mathbf{m}}{||\mathbf{m} ||}}(\mathbf{0}) \)
\( \mathcal{C}_{1}(\mathbf{0}) \)
Bijectivity condition
Examples
Find bijective digitized reflections
\( \bullet \) Idea: use bijectivity condition of digitized rotations
(Jacob, Andres, Nouvel, Roussillon, Coeurjolly)
\( \bullet \) Geometric algebra, rotation of angle \(\theta\) of an object \(\mathbf{x}\):
Find bijective digitized rotations
\( \bullet \) \(\cos{(\frac{\theta}{2})},\sin{(\frac{\theta}{2})}\)?
\( \bullet \) Rotation operator valid up to a scale, then
Back to digitized reflections
Find bijective digitized reflections
\( \bullet \) Idea
\( m_b \) : digitized bijective reflection
\(\Leftrightarrow \) \(-\mathbf{e}_1 m_b \mathbf{e}_1^{-1}\) is also a bijective digitized reflection
\(\Leftrightarrow \) \(-\mathbf{e}_1 (a \mathbf{e}_1 + b \mathbf{e}_1) \mathbf{e}_1^{-1} \) is also a bijective digitized reflection
\( \bullet \) Insert in the definition of digitized reflection
\(\Leftrightarrow \mathbf{e}_1 \mathbf{m}_b \mathbf{e}_1^{-1} \mathbf{x} \mathbf{e}_1 \mathbf{m}_b^{-1} \mathbf{e}_1^{-1} \)
\(\Leftrightarrow (\mathbf{e}_1 \mathbf{m}_b) (\mathbf{e}_1^{-1} \mathbf{x} \mathbf{e}_1) (\mathbf{e}_1 \mathbf{m}_b) ^{-1} \)
reflection of \( \mathbf{x} \) w.r.t. \( \mathbf{e}_2\) axis
Bijective digitized reflections
\(\Leftrightarrow (\mathbf{e}_1 \mathbf{m}_b) (\mathbf{e}_1^{-1} \mathbf{x} \mathbf{e}_1) (\mathbf{e}_1 \mathbf{m}_b) ^{-1} \)
\( \bullet \) \( \mathbf{e}_1 \mathbf{m}_b \)?
\( \mathbf{e}_1 (a \mathbf{e}_1 + b \mathbf{e}_2) = a + b \mathbf{e}_{12}\)
\( \rightarrow \)homogeneous to the operator performing a rotation in geometric algebra
Bijective digitized reflections
\( \bullet \) \( a,b \) ?
\( \rightarrow \) Use the bijectivity of digitized rotations
\( \mathbf{e}_1 (a \mathbf{e}_1 + b \mathbf{e}_2) = a + b \mathbf{e}_{12}\)
\( \rightarrow \)homogeneous to the operator performing a rotation in geometric algebra
Results
\( \bullet \) \( a,b \) ?
\( a = (k+1) ; b = k\)
\( \mathbf{m}_b = (k+1) \mathbf{e}_1 + k \mathbf{e}_2, k\in \mathbb{N} \)
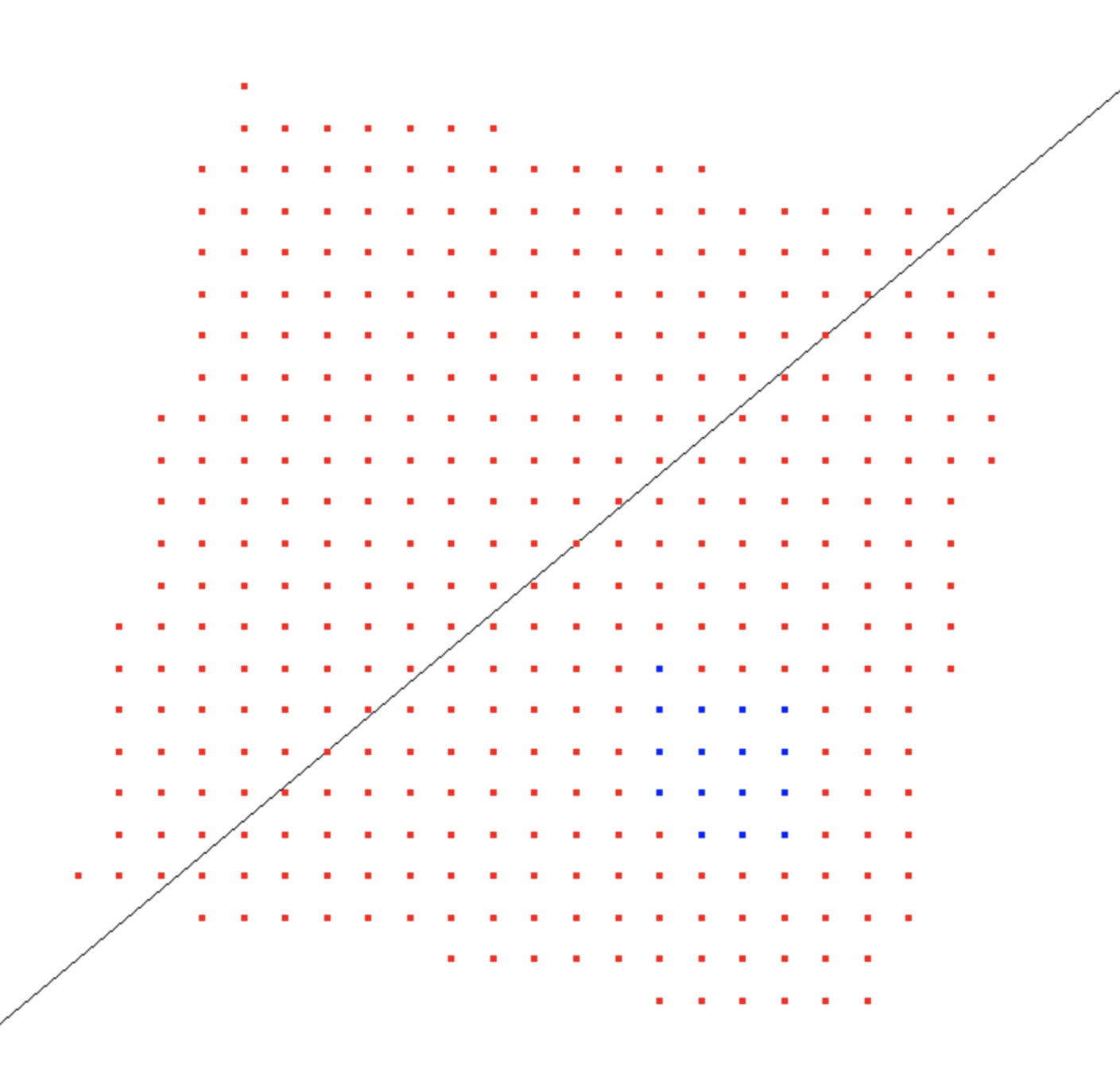
Angular distribution of digitized reflections
Distribution of bijective digitized reflections
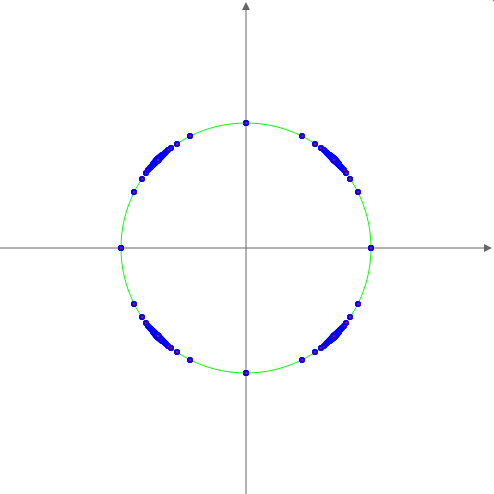
bijective digitized reflections
bijective digitized rotations
Bijective approximation of rotations from bijective digitized reflections
Approximations for reflections
Input: any digitized reflection
Problem: find the "nearest" bijective digitized reflection
Approximation
Approximations and bijectivity
digitized reflection \( \mathbf{m} \)
bijective approximation \( \widetilde{\mathbf{m}} \)
Digitized rotations and approximation
Bijective digitized rotations from reflections
- Composition of a digitized reflection (axis \( \mathbf{e}_{1} \)) and a bijective digitized reflection \( \rightarrow \) bijective digitized rotation
Composition of two bijective digitized reflections \( \rightarrow \) bijective approximation of a digitized rotation
Idea:
\( \hookrightarrow \) Approximate a Euclidean rotation of angle \( \theta\) from 2 bijective reflections
How to choose the 2 digitized reflections?
Bijective digitized rotations from reflections
How to choose the 2 digitized reflections ?
\( \bullet \) Constraint: angle between the 2 normal vectors is \( \frac{\theta}{2} \)
where \( \theta\) is the rotation angle
Bijective digitized rotations from reflections
Method
\( \bullet \) Given \( k_{\max} \) and \(\mathbf{B}_{k_{\max}} \) (bijective reflections)
\( \bullet \) loop over all bijective reflections \( \mathbf{m}_{1} \in \mathbf{B}_{k_{\max}} \)
\( \bullet \) Look for \( \mathbf{m}_{2} \) such that the relative angle between \(\mathbf{m}_{1} \) and \(\mathbf{m}_{2} \) is half the angle of rotation
\( \bullet \) Return the couple \( \mathbf{m}_{1},\mathbf{m}_{2} \) whose relative angle is the closest to \( \frac{\theta}{2} \)
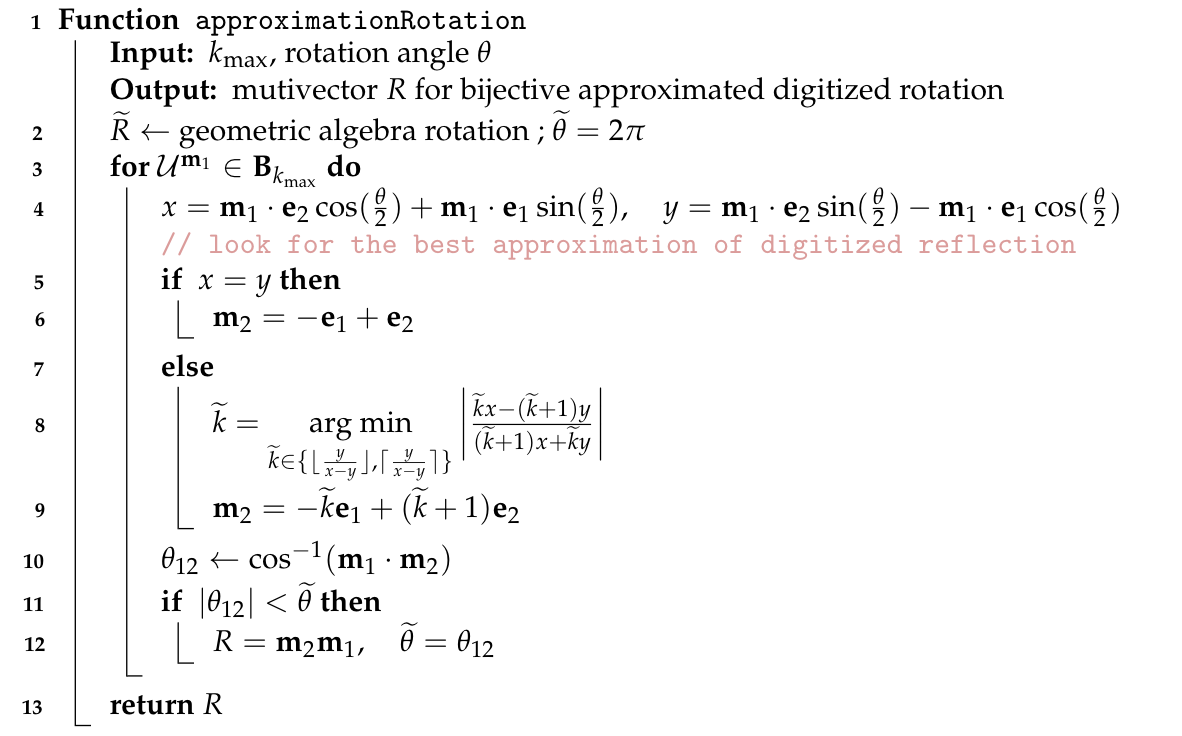
Bijective digitized rotations from reflections
Algorithm
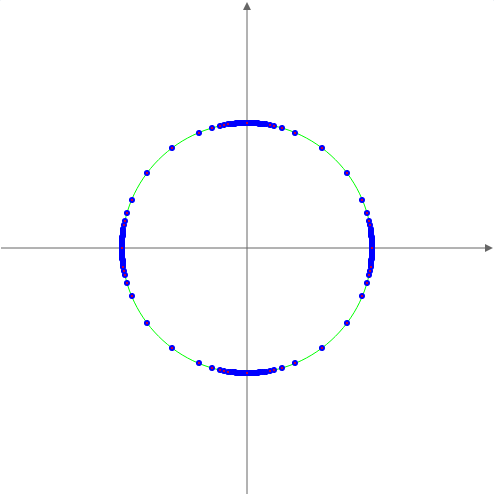
Approximation of bijective digitized rotations
Resulting distribution
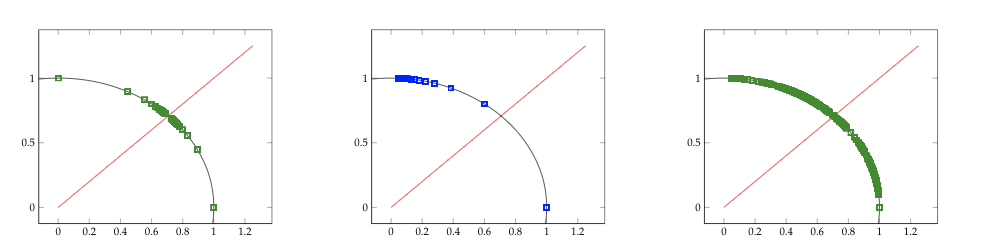
bijective digitized reflections
bijective digitized rotations
approximation
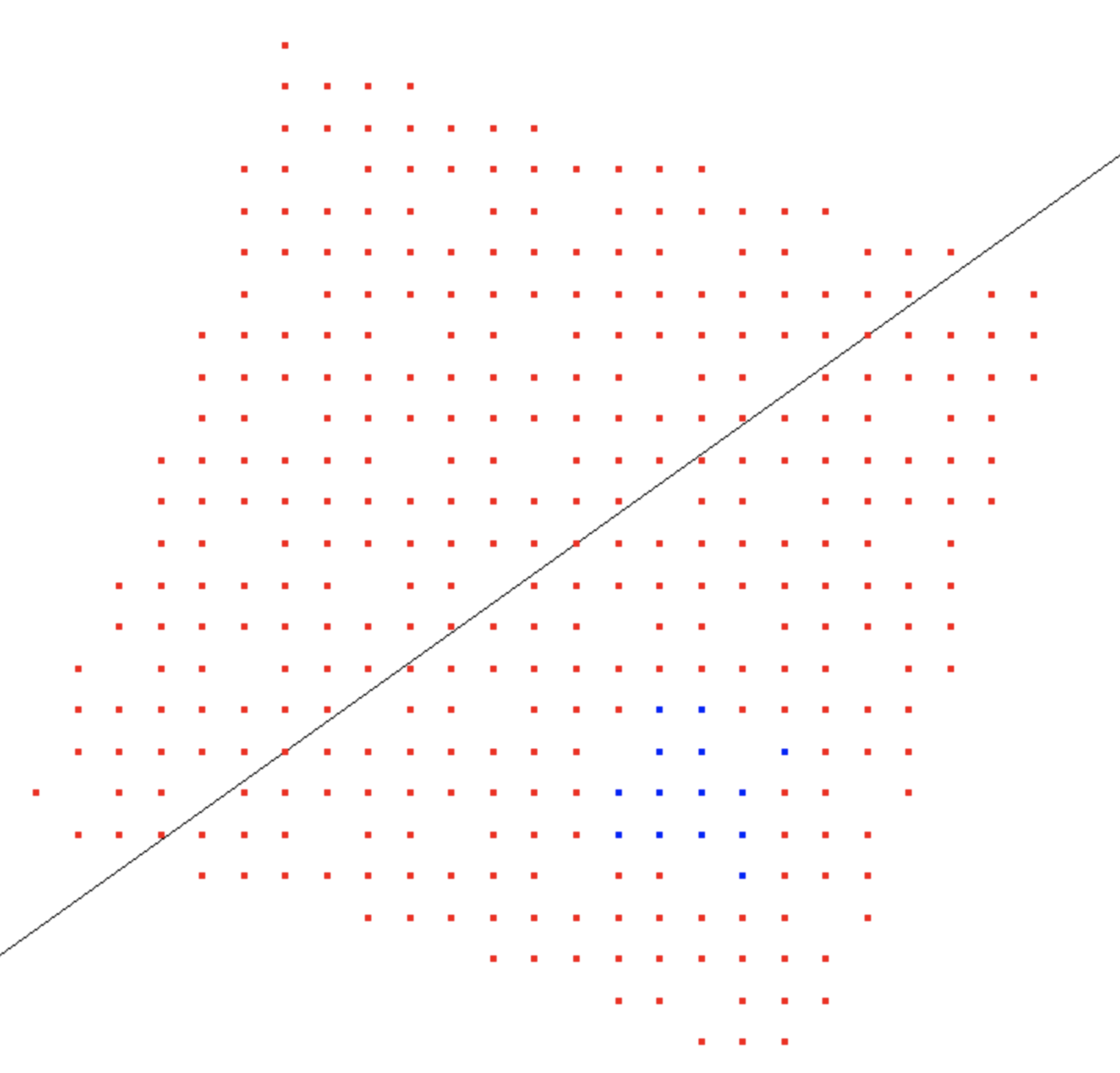
With Garamon
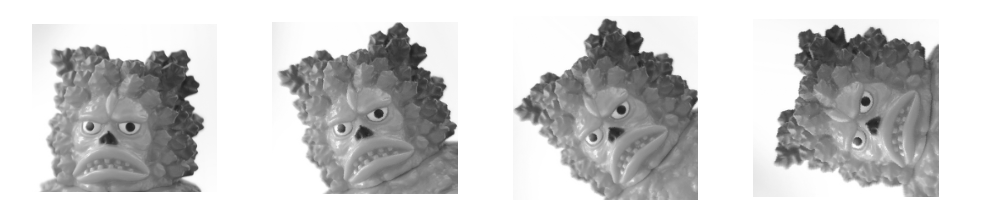
\( \hookrightarrow \) No double points
\( \hookrightarrow \) No holes
Contributions and perspectives
New bijective digitized rotations from digitized reflections
\( \hookrightarrow \) more bijective digitized rotations
\( \hookrightarrow \) simple method
\( \hookrightarrow \) can be extended...
Perspectives
\( \hookrightarrow \) comparison with the main methods to perform bijective rotations like
quasi-shears, FFT, rotations from reflections with digital lines (Andres), ...
Thanks for your attention!